KS0096 Keyestudio CNC Kit (CNC Shield V4.0 + Nano 3.0 + 3xA4988 Sürücü/GRBL uyumlu)

Bağlantı Şekli

Sürücü Yazılımı ve IDE Kurulumu
Sürücü Yazılımı Kurulumu
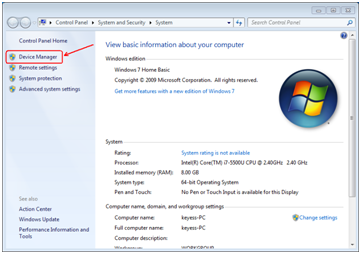
A. Ana kartı bilgisayara bağlayın ve ardından "Aygıt Yönetimi" ne girmek için "Bilgisayar" ı sağ tıklatın.
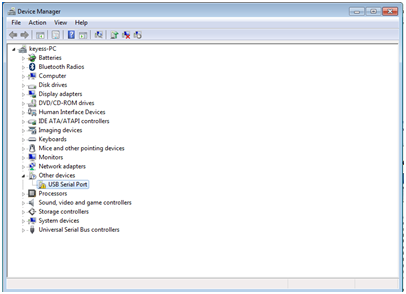
B. "USB Seri Bağlantı Noktası" görünerek "Diğer aygıtlar" ı çift tıklayın.
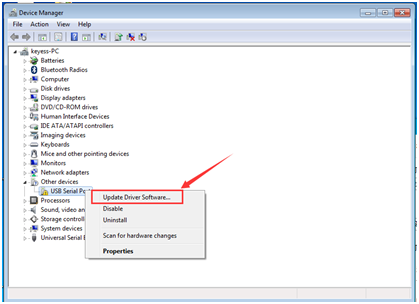
Ardından, sürücü yazılımını yüklemek için "USB Seri Port" u sağ tıklayın ve "Sürücü Yazılımını Güncelle" yi seçin.
Bundan sonra, dosyayı bulmak için "Sürücü yazılımı için bilgisayarıma gözat" ı seçin.
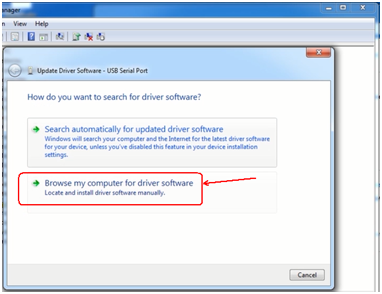
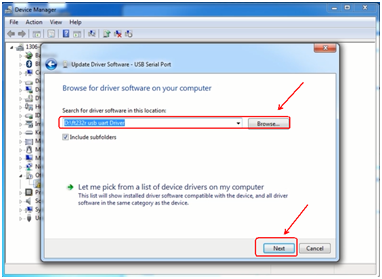
Sürücü yazılımını aramak için göz atın.
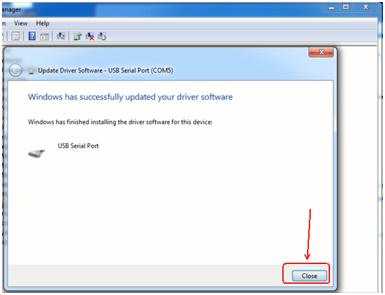
Sürücü yazılımınız güncellendikten sonra işlemi tamamlamak için "Kapat" ı tıklayın.
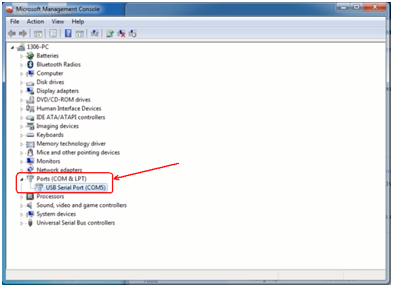
C. Son olarak, kurulum tamamlandı ve "Aygıt Yöneticisi" nde "Bağlantı Noktaları" nı çift tıklayın, "USB Seri Bağlantı Noktası" nı görebilirsiniz.
IDE Kurulumu
Başlamak için arduino-1.5.6-r2-windows'a çift tıklayın.
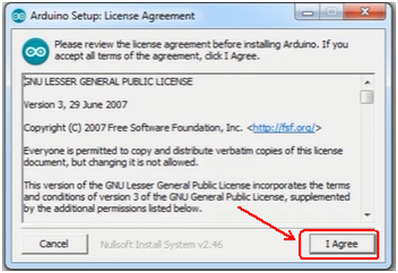
Lisans sözleşmesini kabul etmek için "Kabul Ediyorum" u seçin.
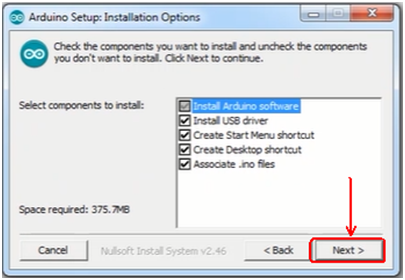
Kurulacak bileşenleri seçin ve "İleri" ye tıklayın.
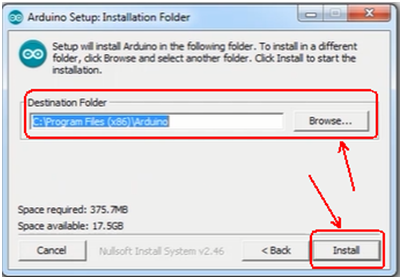
"Gözat" a tıklayın ve başka bir klasör seçin Yüklemeyi başlatmak için "Yükle" ye tıklayın.
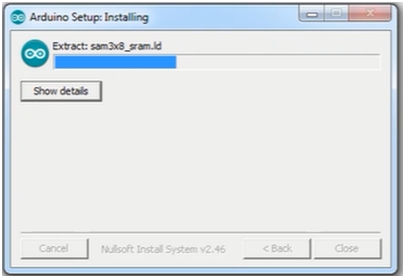
Son olarak, bitirmek için birkaç dakika bekleyin.
Kullanım Metodu
Ana Kart Testi
İlk olarak, ana kart, shield ve üç motorun normal şekilde çalışıp çalışmadığını test etmek için IDE'ye aşağıdaki kodu girin.
Açıklama
1. Giriş PWM sinyalinin frekansını arttırmak için 800 saniye olan
delayMicroseconds(800) değerini düşürürseniz, step motorun dönüş hızını
artırabilirsiniz. Değer değişikliği çok fazla olamaz yoksa motorun
hareketi durur.
2. A4988 üzerindeki düğmeyi çevirin, torku değiştirmek için motorların çıkış akımını ayarlayabilirsiniz.
Kod
#define EN 8 // stepper motor enable, low level effective
#define X_DIR 5 //X axis, stepper motor direction control
#define Y_DIR 6 //y axis, stepper motor direction control
#define Z_DIR 7 //zaxis, stepper motor direction control
#define X_STP 2 //x axis, stepper motor control
#define Y_STP 3 //y axis, stepper motor control
#define Z_STP 4 //z axis, stepper motor control
/*
// Function: step -control the direction and number of steps of the stepper motor
// Parameter: dir -direction control, dirPin corresponds to DIR pin, stepperPin correspomds to
step pin, steps is the number of steps.
// no return value
*/
void step(boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite(dirPin, dir);
delay(50);
for (int i = 0; i < steps; i++) {
digitalWrite(stepperPin, HIGH);
delayMicroseconds(800);
digitalWrite(stepperPin, LOW);
delayMicroseconds(800);
}
}
void setup(){// set the IO pins for the stepper motors as output
pinMode(X_DIR, OUTPUT); pinMode(X_STP, OUTPUT);
pinMode(Y_DIR, OUTPUT); pinMode(Y_STP, OUTPUT);
pinMode(Z_DIR, OUTPUT); pinMode(Z_STP, OUTPUT);
pinMode(EN, OUTPUT);
digitalWrite(EN, LOW);
}
void loop(){
step(false, X_DIR, X_STP, 3200); // x axis motor rotates CCW for 1 circle, as in 200 steps
step(false, Y_DIR, Y_STP, 3200); // y axis motor rotates CCW for 1 circle, as in 200 steps
step(false, Z_DIR, Z_STP, 3200); // z axis motor rotates CCW for 1 circle, as in 200 steps
delay(1000);
step(true, X_DIR, X_STP, 3200); // X axis motor rotates CW for 1 circle, as in 200 steps
step(true, Y_DIR, Y_STP, 3200); // y axis motor rotates CW for 1 circle, as in 200 steps
step(true, Z_DIR, Z_STP, 3200); // z axis motor rotates CW for 1 circle, as in 200 steps
delay(1000);
} |
Firmware ve GRBL Denetleyici Kurulumu
a. Keyestudio UNO R3'e test programını yazın
Veri paketindeki GRBL_ Arduino_Library_keyes klasörünü kopyalayın ve
Arduino IDE doküman kurulumunuzdaki klasör kitaplıklarına yapıştırın.
Kod
#include
void setup(){
startGrbl();
}
void loop(){}
// |
Keyestudio UNO R3'e yukarıdaki kodu yazın
b. GrblController361 Yazılımını Kurun. Grbl Controller, G Kodu'yu CNC
Makinelerine göndermek için kullanılan bir yazılımdır. Kurulum
paketinizde Grbl Controller361 Setup programını çalıştırın, aşağıdaki
arayüz ortaya çıkacaktır:
Devam etmek için İleri'ye tıklayın.
Lisans sözleşmesi için lütfen Sözleşmeyi kabul ediyorum'u işaretleyin ve İleri'yi tıklayın.
Kur'a devam etmeye hazır olduğunuzda İleri'yi tıklatın.
Devam etmek için İleri'yi tıklayın. Yüklemek için farklı bir klasör seçmek isterseniz, Gözat'ı tıklayın.
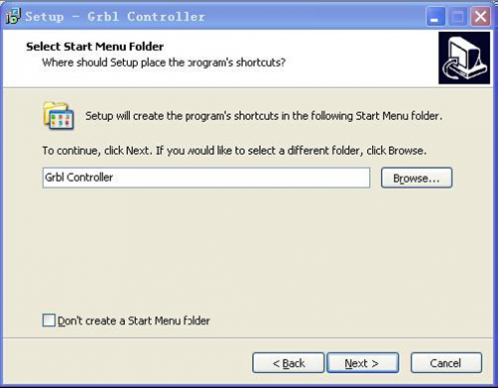
Devam etmek için İleri'yi tıklayın. Programın kısayollarını yerleştirmek için farklı bir klasör seçmek isterseniz Gözat'ı tıklayın.
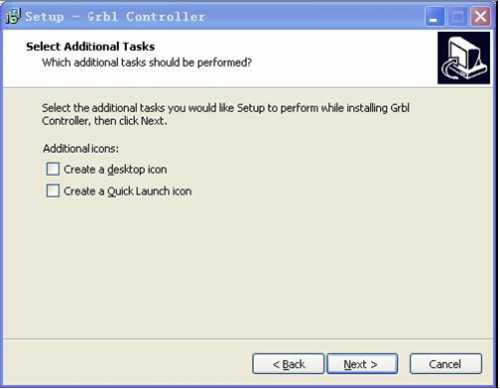
Grbl Denetleyiciyi yüklerken Kurulum'un gerçekleştirmesini istediğiniz ek görevleri seçin, ardından İleri'yi tıklatın.
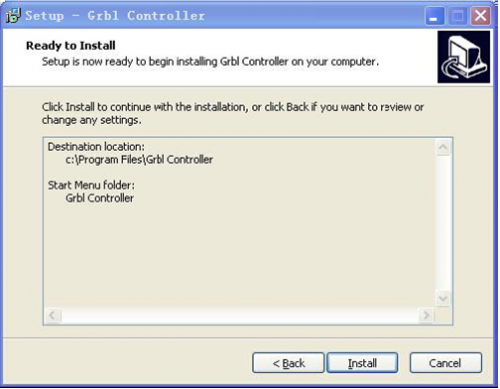
Yüklemeye devam etmek için Yükle'yi tıklayın.
Sonrakine tıkla.
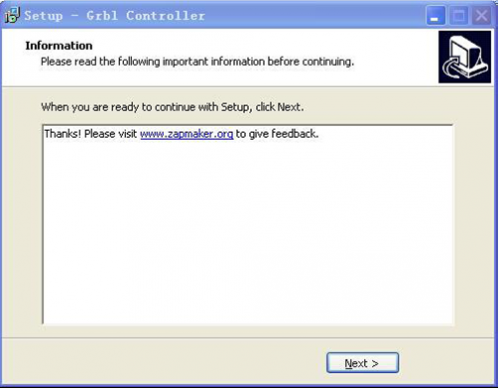
Sonunda kurulumu tamamlamak için "Finish” e tıklayın.

c. Grbl Denetleyicideki G-Kodu Test edin
Tüm harici aygıtlarınızı doğru şekilde bağlayın ve bir USB kablo
kullanarak ana karta güç verin , ardından Grbl Controller'ı çalıştırın.
CNC Makinelerini bilgisayara bağlayarak seri portu açmak için IDE COM
portu ile aynı portu seçin ve "Aç (Open)" düğmesine tıklayın.
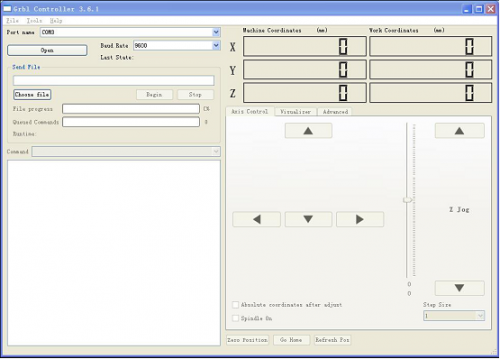
Seri portu açtıktan sonra "Aç (Open)” butonu "Kapat/Sıfırla (Close/Reset)” olarak değişir ve kırmızı olur!
Bu sırada motorların hareket yönünü ayarlamak için aşağıdaki diyagramda
gösterildiği gibi X ekseni, Y ekseni, Z eksenini tıklatabilirsiniz.
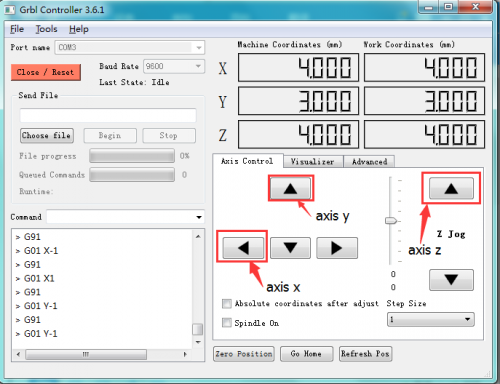
Notlar: Eksenleri ayarladıktan sonra, G-Kodu dosyasına başlamadan önce tekrar kapatıp açmanız gerekir.
Şimdi deneme zamanı geldi! Yeni başlayansanız test yapmak için "Dosya
seç (Choose File)”e tıklayıp veri paketindeki cn isimli G-Kod dosyası
seçin, arayüz açılacak:
GrblController.
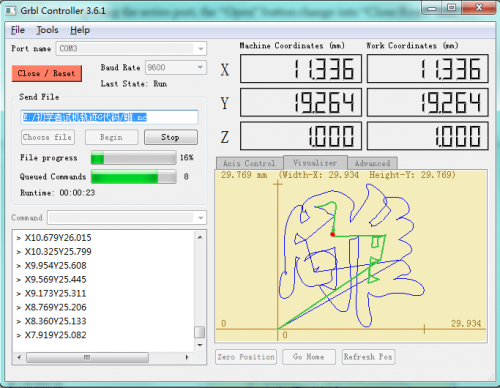
"Begin (Başla)" e tıklayın ve motorların koordinatlarda nasıl hareket ettiğini görün.
Kaynaklar
Arduino IDE Download
https://www.arduino.cc/en/Main/Donate
GRBL_Arduino_Library_keyes (Firmware) Download
https://drive.google.com/open?id=1JzJwVoO0xkxWDXvDlgE8X8atBzl2SJdw
Driver usb_ch341_3.1.2009.06 Download
https://drive.google.com/open?id=1FJ2beDCUNKTNzWsCGDx7JyI_ZDRCl_ry
G-Code for Testing Download
https://drive.google.com/open?id=1BWS4MXaZ-xCg5v_bz4NP3lxg9tbOuZ4r
Grbl Controller361 Setup Download
https://drive.google.com/open?id=1JSCtHr7FLF7UMxXeVGpwMbWn3BVZo7jh
PDF:
https://drive.google.com/open?id=1KBUZFZUAur71cUTBaiqWdkmQPUyjECxK