






Keyestudio 5V Step Motor ve Sürücü Modül
5V Stepper Motor
Bu ürün bir step motor 28BYJ-48 ve ULN2003 sürücü setidir. Kademeli (Step) motor, elektrik sinyallerini ayrı mekanik hareketlere dönüştüren bir elektromekanik cihazdır. Bir step motorun şaftı veya mili, elektrik komut sinyalleri sırayla uygulandığında, ayrı adımlarda döner. Motorların dönüşü, bu uygulanan giriş sinyalleriyle birkaç doğrudan ilişkiye sahiptir. Uygulanan darbelerin sırası, doğrudan motor millerinin dönme yönü ile ilgilidir. Motor millerinin dönme hızı doğrudan giriş sinyallerinin frekansı ile ilgilidir ve dönme uzunluğu doğrudan uygulanan giriş sinyallerinin sayısı ile ilgilidir. En önemli avantajlarından biri, bir açık döngü sisteminde tam olarak kontrol edilebilmesidir. Açık döngü kontrolü, pozisyon hakkında hiçbir geri bildirim bilgisi gerekmediği anlamına gelir. Bu kontrol türü, optik kodlayıcılar gibi pahalı algılama ve geri bildirim cihazlarına duyulan ihtiyacı ortadan kaldırır. Konumunuz sadece giriş adımı sinyallerini takip ederek bilinir.

Özellikler
- Motorun dönüş açısı giriş sinyaliyle orantılıdır.
- Motor dururken tam tork değerine sahiptir (sargılar enerjilenmişse)
- İyi kademeli motorlar bir adımın %5'i kadar bir hata oranına sahiptir ve bu hata bir adımdan diğerine kümülatif olmadığından (eklenerek çoğalmadığından) hassas konumlandırma ve hareketin tekrarlanabilirliği çok iyi işler.
- Başlatma / Durdurma / Ters Çevirmede mükemmel tepki.
- Motorda kontak fırçası bulunmadığından çok güvenilir. Bu nedenle, motorun ömrü basitçe yatağın ömrüne bağlıdır.
- Motorlar dijital giriş sinyallerine yanıt vererek, açık döngü kontrolü sağlayarak motoru kontrol etmeyi daha basit ve daha az maliyetli hale getirir.
- Doğrudan mile bağlı bir yük ile çok düşük hızda senkron dönme elde etmek mümkündür.
- Hız, giriş sinyallerinin frekansıyla orantılı olduğundan, çok çeşitli dönme hızları gerçekleştirilebilir.
28BYJ-48 Step Motor Parametreleri
- Model: 28BYJ-48
- Anma gerilimi: 5VDC
- Faz Sayısı: 4
- Hız Değişim Oranı: 1/64
- Adım açısı: 5.625°/64
- Frekans: 100Hz
- DC direnci: 50Ω ± 7% (25)
- Rölantide in-traction Çekiş Frekansı:> 600Hz
- Rölantide out-traction Çekiş Frekansı:> 1000Hz
- Çekiş Torku> 34.3mN.m (120Hz)
- Kendiliğinden konumlanan Tork> 34,3mN.m
- Sürtünme torku: 600-1200 gf.cm
- Tork çekin: 300 gf.cm
- İzolasyon direnci> 10MΩ (500V)
- Yalıtılmış elektrik gücü: 600VAC / 1mA / 1s
- İzolasyon sınıfı: A
- Sıcaklıktaki Artış 40K (120Hz)
- Gürültü 35dB (120Hz, Yüksüz, 10cm)
Bağlantı Şeması
| Pin | Description |
|---|---|
| OUT1 | Motor output |
| OUT2 | Motor output |
| OUT3 | Motor output |
| OUT4 | Motor output |
| VCC | Motor output |
| VCC | 5V |
| GND | GND |
| IN1 | Motor input |
| IN2 | Motor input |
| IN3 | Motor input |
| IN4 | Motor input |
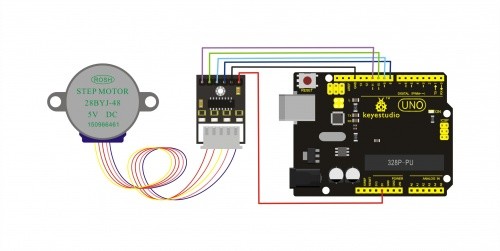
UNO R3 için bağlantı:
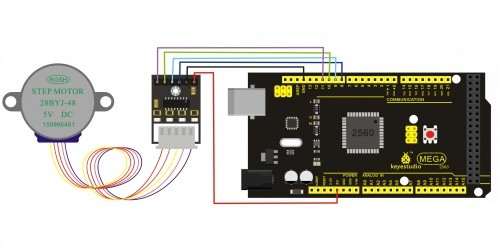
2560 R3 için Bağlantı:
Örnek Kod
#include Stepper.h>
#define STEPS 100
Stepper stepper(STEPS, 8, 9, 10, 11);
int previous = 0;
void setup()
{
stepper.setSpeed(90);
}
void loop()
{
int val = analogRead(0);
stepper.step(val - previous);
previous = val;
}
Stepper kütüphanelerini indirin: [1]
Kaynaklar
PDF File:
https://drive.google.com/open?id=1AvIjQSusny7adTyO1c3qO5FB4Tws1Z0a
Download Link of Stepper.h library:
http://www.keyestudio.com/files/index/download/id/1505885239/
Video: