




Keyestudio 9G Servo Motor Mavi 90°
Keyestudio 9G Servo Motor Mavi 90°

Tanıtım
Bu keyestudio mikro servo motor 90 derece ile geliyor.
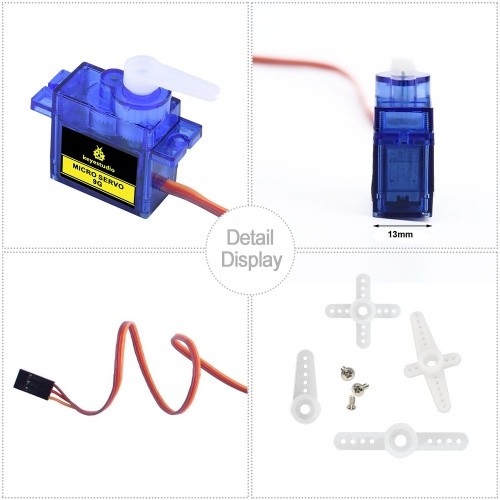
Servo motorunuzla birlikte çeşitli beyaz motorlar bulacaksınız servo miline bağlanan bağlantı parçaları. Eklemeyi seçebilirsiniz devre için istediğiniz herhangi bir montaj. Görsel bir yardım görevi görecek, servo dönüşünü görmeyi kolaylaştırıyor.
Servoda kahverengi, kırmızı ve turuncu çizgi (farklı marka farklı renk olabilir). Kahverengi çizgi GND için, kırmızı bir güç 5V için, turuncu bir sinyal terminali için (PWM sinyal).
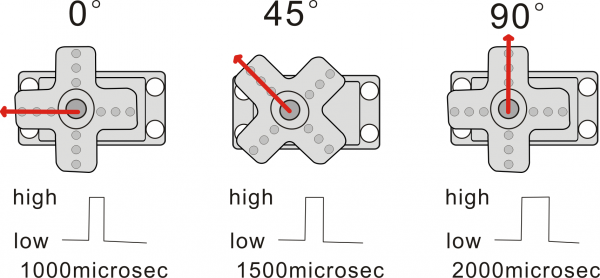
Servonun dönme açısı, görevi düzenleyerek kontrol edilir PWM (Darbe Genişlik Modülasyonu) sinyalinin çevrimi. Standart döngüsü PWM sinyali 20ms (50 Hz) olarak sabitlenir ve darbe genişliği 1ms-2ms arasında dağıtılır. Darbe genişliği dönüşe karşılık gelir servo açısı (0 ° ~ 90 °).
Parametreler
- Çalışma gerilimi: DC 4.8V〜6V
- Açı aralığı: yaklaşık 90 ° (1000 → 2000μsn'de)
- Darbe genişliği aralığı: 1000 → 2000μsec Yüksüz hız: 0.12 ± 0.01 sn / 60 (DC 4.8V); 0,1 ± 0,01 sn / 60 (DC 6V li Yüksüz akım: 200 ± 20mA (DC 4.8V); 220 ± 20mA (DC 6V li
- Durdurma torku: 1.1 ± 0.01kg / cm (DC 4.8V); 1,3 ± 0,1 kg / cm (DC 6V li
- Durdurma akımı: 600 ± 30mA (DC 4.8V); 750 ± 30mA (DC 6V li
- Bekleme akımı: 4 ± 1mA (DC 4.8V); 4 ± 1mA (DC 6V)
- Çalışma sıcaklığı: -10 ℃ 〜50 ℃
- Sıcaklığı kaydedin: -20 ℃ 〜60 ℃
- Motor kablosu uzunluğu: 250 ± 5 mm
- Boyutlar: 22.7mm * 12.12mm * 25.7mm
- Ağırlık: 12 ± 1 g (servo yuvalar olmadan)
Boyutlar

Detay Gösterim

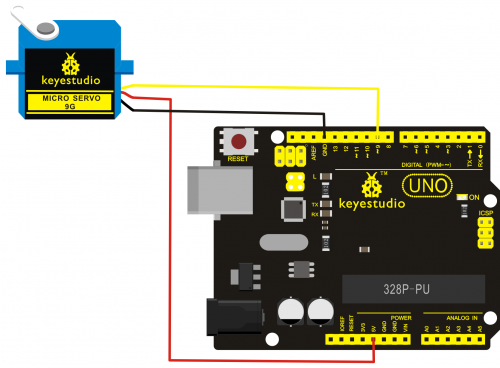
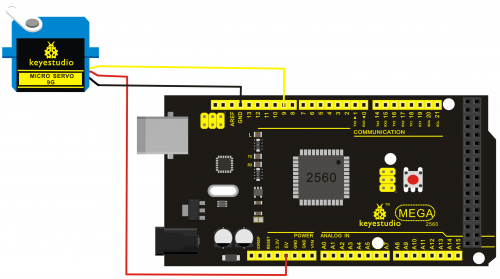
Bağlantı Diagramı
Motoru dijital pime 9 bağlayın.
UNO R3 Bağlantısı :
2560 R3 Bağlantısı :
Örnek Program
Arduino ile bir servo motoru kontrol etmenin iki yolu vardır.
Bunlardan biri kare üretmek için Arduino'nun ortak bir dijital sensör portunu kullanmaktır PWM sinyalini simüle etmek ve kullanmak için farklı görev döngüsüne sahip dalga Motorun konumunu kontrol etmek için sinyal.
Başka bir yol, Arduino'nun Servo işlevini doğrudan motoru kontrol edin. Bu şekilde program daha kolay olacak ama Servo fonksiyonu için sadece iki kontaklı motoru kontrol edin, sadece dijital pin 9 ve 10 kullanılabilir.
Arduino sürücü kapasitesi sınırlıdır. Bu nedenle, birden fazla motoru kontrol etmeniz gerekiyorsa, harici güce ihtiyacınız olacaktır.
Metot 1:
Örnek Program A
int servopin=9;// select digital pin 9 for servomotor signal line
int myangle;// initialize angle variable
int pulsewidth;// initialize width variable
int val;
void servopulse(int servopin,int myangle)// define a servo pulse function
{
pulsewidth=(myangle*11)+500;// convert angle to 500-1490 pulse width
digitalWrite(servopin,HIGH);// set the level of servo pin as "high”
delayMicroseconds(pulsewidth);// delay microsecond of pulse width
digitalWrite(servopin,LOW);// set the level of servo pin as "low”
delay(20-pulsewidth/1000);
}
void setup()
{
pinMode(servopin,OUTPUT);// set servo pin as "output”
Serial.begin(9600);// connect to serial port, set baud rate at "9600”
Serial.println("servo=o_seral_simple ready" ) ;
}
void loop()// convert number 0 to 9 to corresponding 0-90 degree angle, LED blinks corresponding number of time
{
val=Serial.read();// read serial port value
if(val>='0'&&val<='9')
{
val=val-'0';// convert characteristic quantity to numerical variable
val=val*(90/9);// convert number to angle
Serial.print("moving servo to ");
Serial.print(val,DEC);
Serial.println();
for(int i=0;i<=50;i++) // giving the servo time to rotate to commanded position
{
servopulse(servopin,val);// use the pulse function
}
}
}
Metot 2:
Önce Arduino'nun yerleşik servo işlevine ve bazı yaygın ifadelere bir göz atalım.
- 1. (arayüz) —— servo için pin seçin, sadece 9 veya 10 pinini kullanabilirsiniz.
- 2. yazma (açı) —— servo dönme açısını kontrol etmek için kullanılan, 0 derece 90 derece arasında açı ayarlayabilirsiniz.
- 3. servo açısını okumak için kullanılan () ——, write () işlevindeki değeri okumak için bir işlev olarak düşünün.
- 4. takılı () —— servo parametresinin servo pinine gönderilip gönderilmediğini belirler.
- 5. ayırın () —— servo ve pimin bağlantısını kesin ve pim (dijital pim 9 veya 10) PWM bağlantı noktası için kullanılabilir.
Not: yukarıdaki ifadelerin yazılı şekli "servo değişken adına. özel ifadedir ()", ör. myservo. Takın (9).
Yine de, servoyu 9 no'lu pime bağlayın.
Örnek Program B
#include/*define a header file. Special attention here, you can call the servo function directly from Arduino's software menu bar Sketch>Importlibrary>Servo, or input #include . Make sure there is a space between #include and . Otherwise, it will cause compile error. */ Servo myservo;// define servo variable name void setup() { myservo.attach(9);// select servo pin(9 or 10) } void loop() { myservo.write(90);// set rotate angle of the motor }
Yukarıda servo kontrol etmek için iki yöntem vardır. İstediğiniz veya gerçek ihtiyacınıza göre birini seçebilirsiniz.