






Keyestudio Denge Arabası Shield
Contents (Hızlı Menü)
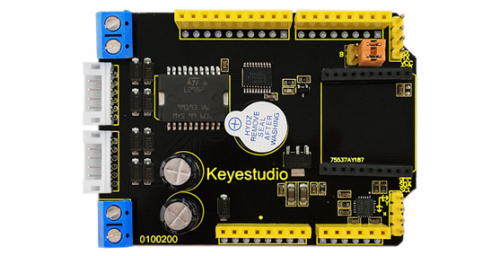
keyestudio Balance Car Shield / keyestudio Denge Arabası Shield
Introduction / Tanıtım
Bu keyestudio kalkanı özellikle Arduino geliştirme kartına dayanan denge arabası için geliştirilmiştir. Özellikle büyük güç motorlarına uygulanan LGS Electronics tarafından üretilen sürücü çipi L298P'yi kullanır. Böylece kalkan iki DC motoru çalıştırabilir ve tahrik akımı 2A'ya kadar çıkabilir.
MPU6050 çipini benimser ve dahili veri yönetimi platformu DMP'yi kullanarak işlem verilerini IIC arabirimi üzerinden verir.
Parameters / Parametreler
- 1. Çalışma Gerilimi: DC 12 V
- 2. Sürücüde Çalışma Akımı: ≤ 2 A
- 3. Çalışma Sıcaklığı: 0 80 ila 80 ℃
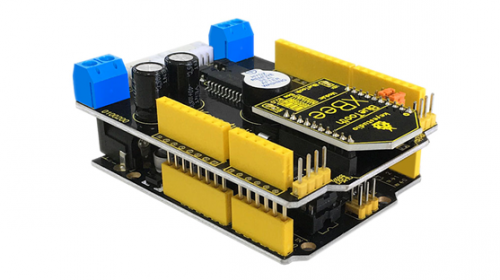
- 4. xbee ile geliyor / Bluetooth Arı kablosuz arayüzü
- 5. Alarm olarak kullanılan yerleşik zil (D6)
- 6. D11, motor 1'in PWM pimi 1, D9, motor 2'nin PWM pimi 2, D 10 ve D12, motor 1'in çıkış pimi, D8 ve D7, motor 2'nin çıkış pimi olarak
- 7. iki PH2.0-6P motor arayüzü ile
Technical Details / Teknik Detaylar
- Dimensions: 77mmx 55mmx 25mm
- Weight: 31g
Simply stack it onto the UNO board Or you can directly copy the code below: Download the PDF: Download the libraries MPU6050: Download the libraries Wire: Download the code: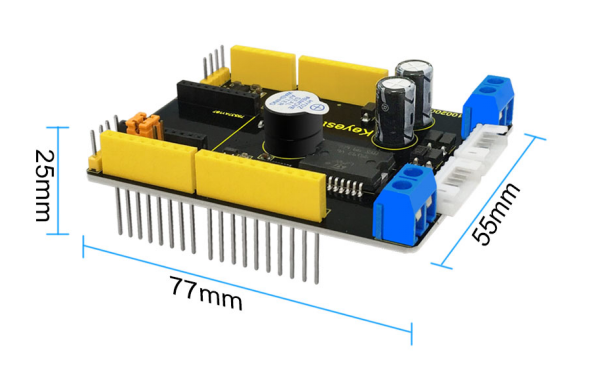
Connection Diagram / Bağlantı Şeması
Sample Code / Örnek kod
/*
MPU6050 Triple Axis Gyroscope & Accelerometer. Free fall detection.
Read more: http://www.jarzebski.pl/arduino/czujniki-i-sensory/3-osiowy-zyroskop-i-akcelerometr-mpu6050.html
GIT: https://github.com/jarzebski/Arduino-MPU6050
Web: http://www.jarzebski.pl
(c) 2014 by Korneliusz Jarzebski
*/
#include
Documents / Dökümanlar
https://drive.google.com/open?id=13AiPQpHPVIGNGdiq7w6BMvr6-JXFRli5
https://drive.google.com/open?id=1hhzfuT0svXpU9bf1Q22QpEhEfaGkPa6Z
https://drive.google.com/open?id=10e6rKkKaSpV_Thoe7dz2ZqoOp_XvPEM-
https://drive.google.com/open?id=1w6vIQVZ0to5t0G_rwvSaGWGdKMhWcrzr