






Keyestudio L298P Shield / Arduino için 2A Yüksek Akımlı Çift Motorlu Sürücü Modülü
Keyestudio L298P Shield / Arduino için 2A Yüksek Akımlı Çift Motorlu Sürücü Modülü
UNO R3 mikrodenetleyicisini kullanabilir ve harici bileşenleri Akıllı robot DIY gibi şaşırtıcı deneyleri tamamlayın. Ne zaman Robotunuzu DIY yapın, sürmek için motor sürücü kartını kullanmak gerekir Bununla birlikte, DC motorların bazen motor sürücü kartını bağlaması gerekir UNO'ya çok rahatsız edici kablolar kullanarak, oldukça rahatsız edici.
Şimdi, L298P ile bu keyestudio motor kalkanını çekirdek olarak piyasaya sürdük. Sadece kullanırken UNO R3 kartına istifleyin. Motorun hız ve yön arayüzleri bağlanmıştır. D3 içindir A ve D12 motorlarının hızını kontrol etmek, D11, B motorunun hızını kontrol etmek içindir ve D13 yönü kontrol etmek içindir.
Yeşil terminal blokları üzerindeki VIN / GND pinlerine bağlanmalıdır. UNO. Kartı klemensler üzerinden veya UNO'nun siyah DC jakı. Maksimum voltaj kaynağı DC 18V'dir.
Yerleşik ayrıca delikli ped ile birlikte gelir, böylece çeşitli prototip devreleri tasarlamak için elektronik elemanlar.
Özellikler
| Mantık parçası giriş gerilimi VD | 5V |
|---|---|
| Tahrik parçası giriş gerilimi VS | Maks DC 18V (DC 7-12V önerilir) |
| Mantık parçası çalışma akımı Sayı | ? 36mA |
| Sürüş parçası çalışma akımı Io | ? 2A |
| Maksimum dağıtım gücü | 25W (T = 75?) |
| Kontrol sinyali giriş seviyesi | Yüksek seviye: 2.3V? Vin? 5V; Düşük seviye: -0.3V? Vin? 1.5V |
| Çalışma sıcaklığı | -25? + 130? |
| Sürücü formu | Çift güç H köprüsü sürüş |
Uyumlu Denetleyici
keyestudio UNO R3 BOARDTeknik detaylar
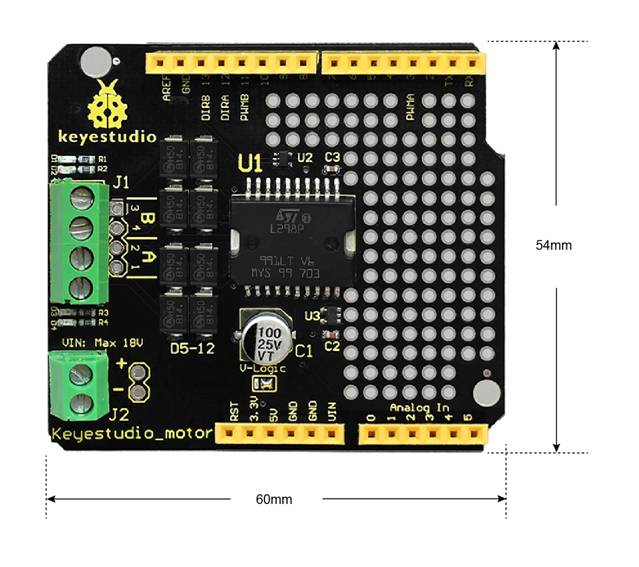
- Dimensions: 60mm x 54mm
- Weight: 20.8g
Pin Şeması
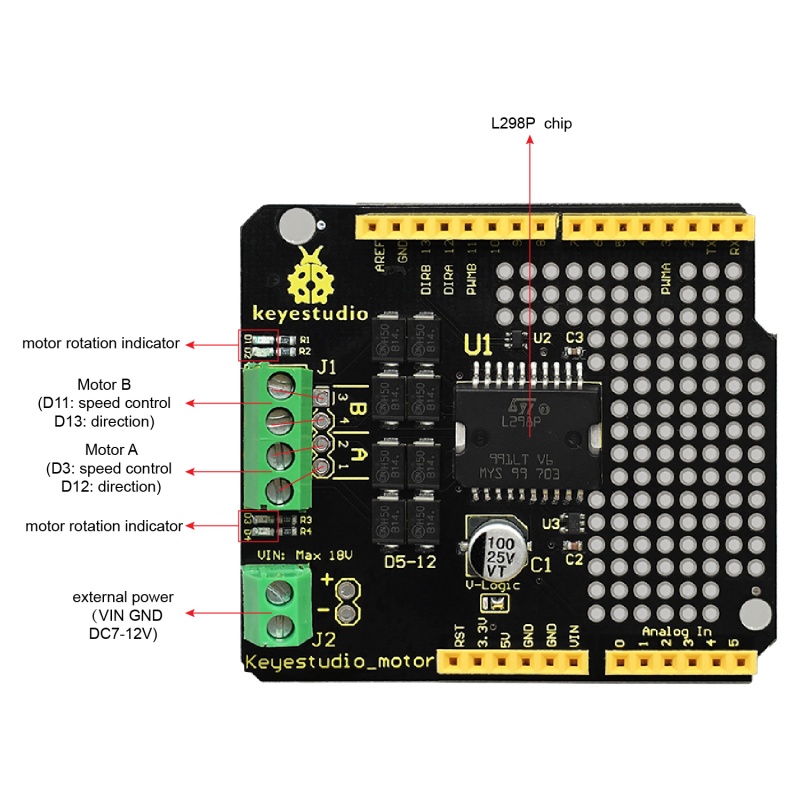
Ekranı UNO R3 kartına istifleyin, ardından terminal bloğuna iki motor bağlayın.
Kodu Yükleyin
Aşağıda bir örnek kod, kopyalayıp yapıştırabilirsinizArduino IDE.
int E1 = 3;
int M1 = 12;
int E2 =11;
int M2 = 13;
void setup()
{
pinMode(M1, OUTPUT);
pinMode(M2, OUTPUT);
}
void loop()
{
digitalWrite(M1,HIGH);
digitalWrite(M2, HIGH);
analogWrite(E1, 200); // PWM regulate speed
analogWrite(E2, 200); // PWM regulate speed
delay(8000);
digitalWrite(M1,LOW);
digitalWrite(M2, LOW);
analogWrite(E1, 200); //PWM regulate speed
analogWrite(E2, 200); //PWM regulate speed
delay(8000);
}
Test Sonucu
Kodu iyi yükleyin, iki motorun önce 8 saniye ileri, ardından tekrar tekrar 8 saniye geri döndüğünü görmelisiniz.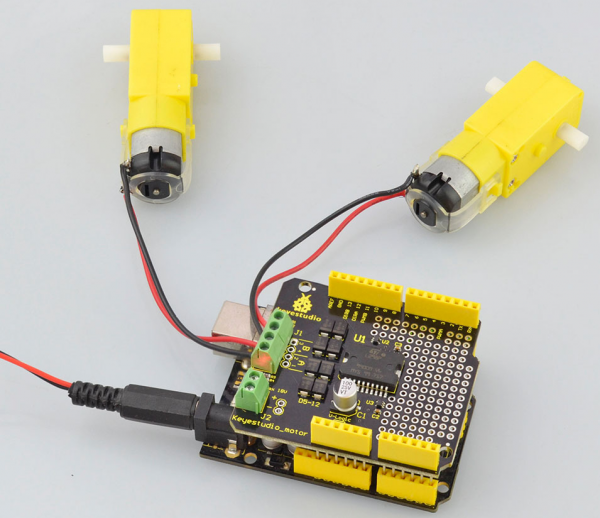
Kaynaklar
You can click here to download the PDFVideo: