






Keyestudio Micro:Bit Motor Sürücü Breakout kart
Keyestudio Motor Drive Breakout Board for micro:bit
Tanıtım
mikro:bit, BBC tarafından gençlerin programlama eğitimi için tasarlanmış giriş seviyesi bir geliştirme kartıdır. Microsoft tarafından geliştirilen PXT grafik programlama arabirimini destekler ve ek bir kod derleyiciyi indirmeksizin Windows, MacOS, IOS, Android ve diğer birçok işletim sistemi altında kullanılabilir.
Mikro:bit'in DC motoru kontrolünü kolaylaştırmak için, bu motor sürücü breakout kartını özel olarak geliştirdik.
TB6612FNG yongası panele entegre edilmiştir. Kanal başına 1,2 A'ya kadar sürekli akım çıkışı, ve 2A/3,2A'e kadar tepe akımı vardır.
4 motor kontrol modu vardır: İleri / Geri / Fren / Dur. PWM destekleme frekansı 100 kHz'e kadardır.
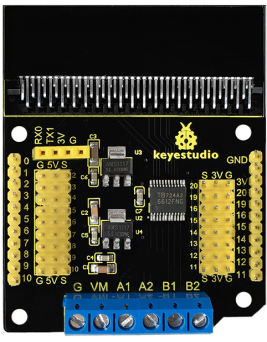
Kablo bağlantısı için, bu motor sürücü breakout kartı tüm arayüzleri 3PIN başlıklı, 3pin kablo kullanarak diğer sensörleri kolayca karta bağlayabileceğiniz bir duruma getirir.
Aynı zamanda, 3,3V ve 5V güç çıkış sağlamak üzere, bir 3,3V ve 5V voltaj regülatör yongası breakout karta entegre edilmiştir.
Kart ayrıca, kolayca Bluetooth modülü bağlamak için, bir seri iletişim portu ile birlikte gelir.
Özellikler
- Dört motor kontrol modu: İleri / Geri / Fren / Durdurma
- 3Pin başlıklarla bağlantı
- Entegre 3.3V ve 5V voltaj regülatör yongası
- Bluetooth modülü için seri iletişim portu
Parametreler
- Giriş Voltajı: DC 6-12V
- Sürücü Kısmi Çalışma Akımı:1.2A
- Ebat: 70mm*58mm
Detaylar
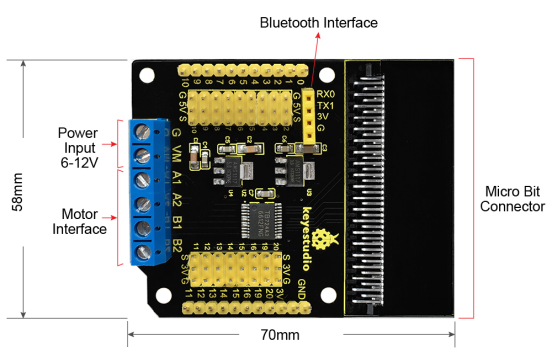
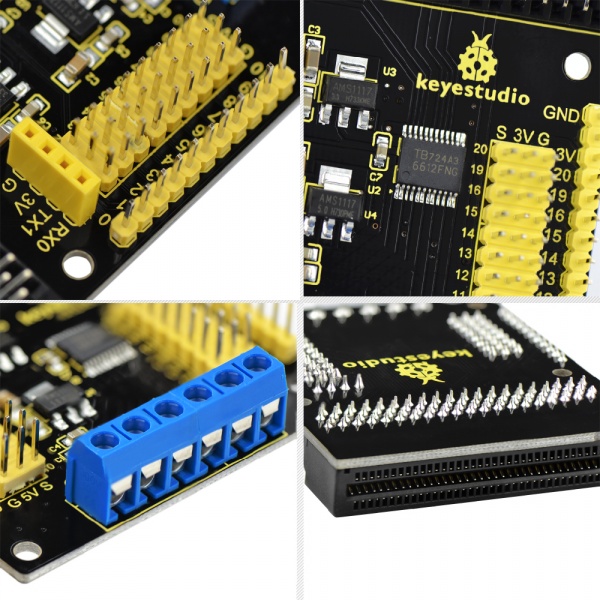
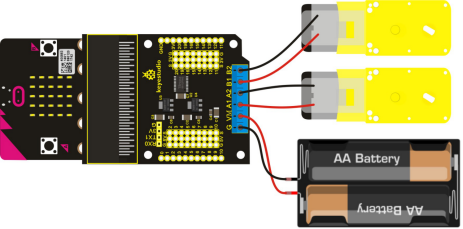
Bağlantı Şeması
Aşağıdaki şema, mikro:bit, motor ve motor sürücü breakout kartın bağlantısını göstermektedir. Bu şekilde motorun dönüşünü gözleyebilirsiniz. İki motoru A1, A2, B1, B2 terminal bloğuna bağlayın; Pilin negatif ucuna GND, pozitif ucuna VM terminali.
Test Kodu
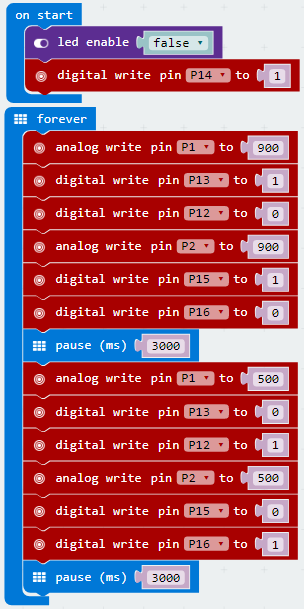
Kod açıklaması şu şekildedir:
Motor1 forward: P13 - HIGH P12 - LOW Speed PWM: P1 Motor2 forward: P15 - HIGH P16 - LOW Speed PWM: P2 Motor1 Backward: P13 - LOW P12 - HIGH Speed PWM: P1 Motor2 Backward: P15 - LOW P16 - HIGH Speed PWM: P2
Test Sonucu
Yukarıdaki şemaya göre kablolayıp, çalıştırıp kodu yükledikten sonra, iki motor döngüsel olarak önce 3 saniye ileri, sonra 3 saniye geri döner.