





Keyestudio Tb6560 Step Motor Sürücü Kartı
Keyestudio Tb6560 Step Motor Sürücü Kartı
Yüksek stabiliteye sahip ekonomik bir step motor sürücüsüdür, güvenilirlik ve bağışıklık. Çeşitli endüstriyel uygulanabilir kontrol ortamları.
Bu sürücü genellikle Tip 35, 39, 42, 57 ile 4, 6 ve 8 telli iki fazlı hibrit step motorlar. 4 çeşit alt bölümleri vardır ve maksimum 16 alt bölüme kadar. Sürüş akımı 0.3A-3A içinde ve çıkış akımı toplam 14 mod ve akım çözünürlüğü yaklaşık 0.2A. İşlevi vardır aşırı akım koruması için otomatik yarı akım, düşük voltaj kapatma ve aşırı sıcaklık kapatma.
Özellikler
- Besleme Gerilimi: DC 8-35V, DC 24V önerilir
- Sürüş Akımı: 0.3-3A
- Mevcut Çözünürlük: 0.2A
- Sürücü Desteği: 4、6、8 telli iki fazlı hibrit step motorlarla 35、39、42、57 yazın
- Max Exciation: 16 alt bölüm
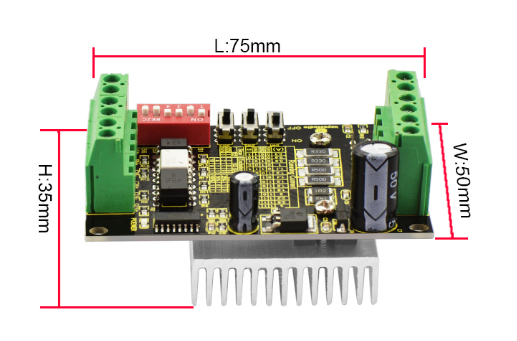
- Boyutlar: 75mm * 50mm * 35mm
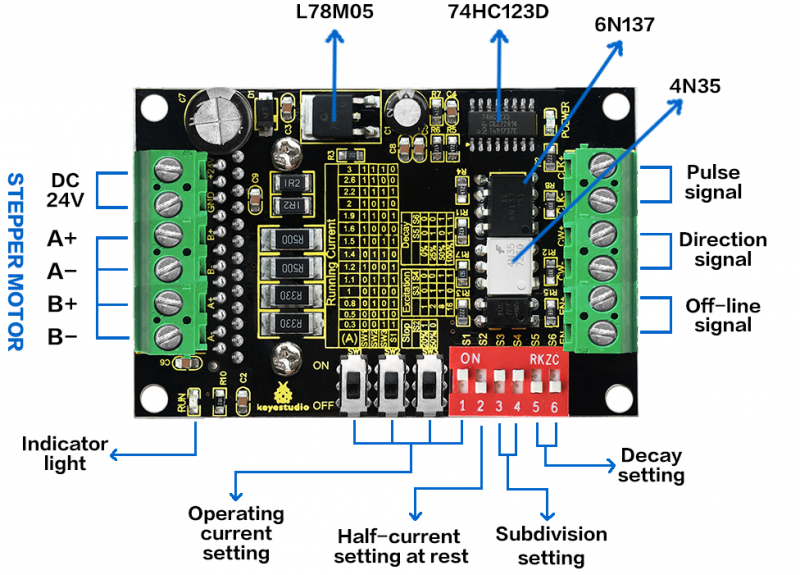
Pin Şeması ve Ayarlar
| Sürücü | Çalıştırma Talimatları |
|---|---|
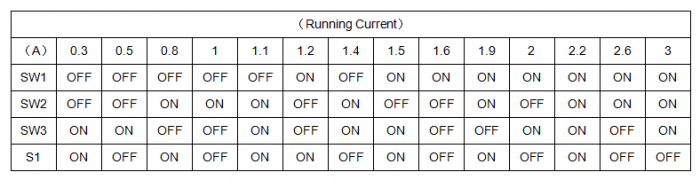
| Geçerli ayar çalışıyor | Sürücü çıkış akımını ayarlamak için dört 14 anahtar SW1, SW2, SW3, S1 anahtarını kullanarak toplam 14 çıkış akımı modu kullanın. |
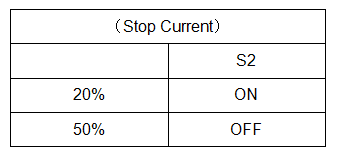
| Geçerli ayarı durdur | Kullanıcı, sürücünün otomatik yarı akımını S2 üzerinden ayarlayabilir.
"1", Durma akımının çalışma akımının% 20'si olarak ayarlandığı anlamına gelir; "0" Durdurma akımı çalışma akımının% 50'si olarak ayarlanır. Genel olarak, motor ve sürücü tarafından üretilen ısıyı azaltmak için S2'yi "1" olarak ayarlayın, güvenilirliği artırmak. |
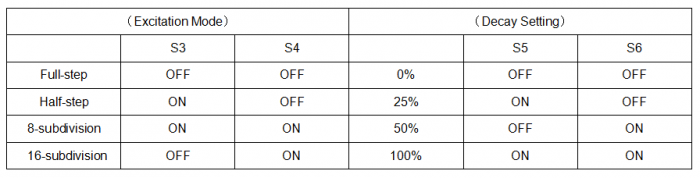
| Uyarma ayarı | Sürücü alt bölümlerini ayarlamak için toplam 4 mod ile S3-S4 kullanın alt bölümü. İlk önce sürücüyü alt bölümü. |
| Çürüme ayarı | Çürüme modunu ayarlamak için S5-S6 kullanın, toplam 4 çürüme modu. Daha iyi sürüş efekti elde etmek için farklı Bozunma modları seçin. |
| Sinyal konnektörü | CLK + / CLK- darbe kontrol sinyalinin pozitif ve negatif terminali;
CW + / CW- yön sinyalinin pozitif ve negatif terminali ENA + / ENA- etkinleştirme sinyalinin pozitif ve negatif terminali |
| Motor konnektörü | A + ve A-, kademeli motor A faz sargısının pozitif ve negatif terminaline bağlanır;
B + ve B-, kademeli motor B-faz sargısının pozitif ve negatif terminaline bağlanır; A fazı ve B fazı sargısı değiştirilirse, motor yönü ters çevrilir. |
| Güç bağlantısı | güç kaynağı için DC akım; DC 8-35V besleme gerilimi aralığı, 24V DC güç kaynağı önerilir.
24V / 5A anahtarlama güç kaynağı kullanmanızı öneririz. |
| Gösterge ışığı | Sürücü açıldığında GÜÇ göstergesi daima açıktır.
RUN göstergesi: Bu göstergenin parlaklığı, motorun çalışma hızı. Motor ne kadar hızlı çalışırsa, o kadar parlak gösterge ışığı. Motor durduğunda, gösterge daima açık veya kapalı olacaktır. |
Ayar Metodu
- 1. 6 giriş terminali ile, Ortak anot veya Ortak katot giriş formuna kolayca bağlanabilir.
- 2. Giriş darbesi seviyesi 5V'tur. 12V seviye darbesi ise, bir 1K direnç bağlamak; 24V seviye darbe ise, bir 2.4K direnç.
- 3. CLK terminalinde nabız var, motor çalışıyor; Nabız yoksa, motoru kilitlemek için otomatik olarak yarı akım moduna girer.
- 4. CW terminali düşük seviye veya yüzer, motor öne doğru döner; yüksek seviyedeyse motor tersine döner.
- 5. EN terminali çalışma modunda düşük seviye veya yüzer; yüksek düzeyde ise, çevrimdışı durumda.
NOT:
- 1. It is necessary to check the wiring repeatedly before powered up, or else the wrong wiring may burn out the chip!
- 2. The setting current should not exceed the rated current of motor.
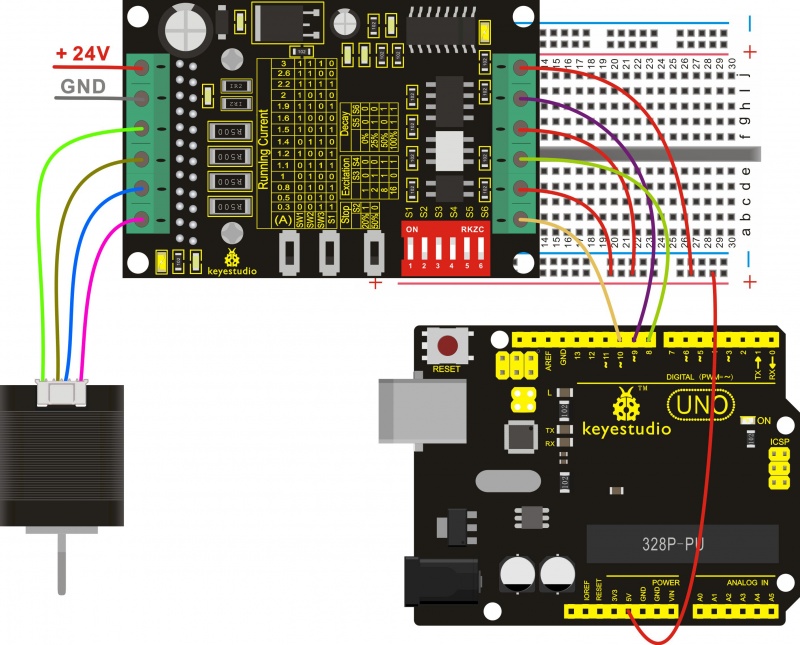
Kablolama Şeması
Örnek Kod
//common anode connection, active Low level for control pin.
//EN+ CW+ CLK+5V connected to controller
const int EN = 10;
const int CLK = 9;
const int CW = 8;
int Distance = 0; // Record the number of steps we've taken
void setup()
{
pinMode(CW, OUTPUT);
pinMode(CLK, OUTPUT);
pinMode(EN, OUTPUT);
digitalWrite(CW, LOW);
digitalWrite(CLK, LOW);
digitalWrite(EN, HIGH);
}
void loop()
{
digitalWrite(EN, HIGH);//High level or enable pin floating, turn off Low level.
digitalWrite(CLK, HIGH);
delayMicroseconds(100);
digitalWrite(CLK, LOW);
delayMicroseconds(100);
Distance = Distance + 1; // record this step // Check to see if we are at the end of our move
// two rotation for 1/8 bridge and 1 rotation for 1/6 bridge (for this code)
if (Distance == 3200) // We are! Reverse direction (invert DIR signal)
{
if (digitalRead(CW) == LOW) {
digitalWrite(CW, HIGH); }
else
{
digitalWrite(CW, LOW);
}
// Reset our distance back to zero since we're // starting a new move
Distance = 0; // Now pause for half a second delay(500);
}
}
Test Sonucu
Deneyde, Tb6560 step motor sürücü kartını 42 kademeli motoru çalıştırmak için UNO R3 kartı saat yönünde saat yönünün tersine, dönüşümlü olarak döngü yapın. Ortak anot bağlantısı kullanır, ve giriş darbe seviyesi 5V'dur. Akım 1.2A ve Durdur olarak ayarlanır Akım, çalışan akımın% 50'si olarak ayarlanır. Faaliyet alt bölümü: 8-alt bölümü ve Gecikme ayarı% 0'dır.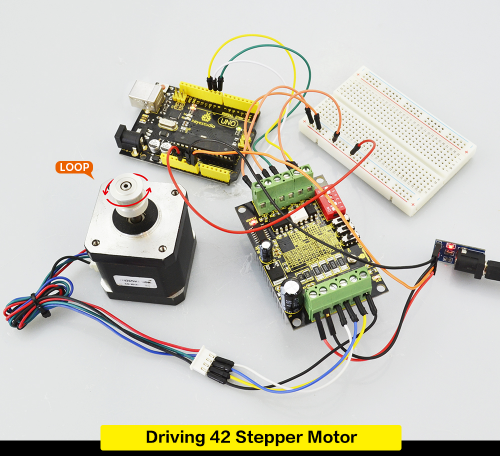
Kaynaklar
Download the PDF:
https://drive.google.com/open?id=1eTFIPojLCJei_9YxbVtXKHLvscUc_i0Y
Download the Code:
https://drive.google.com/open?id=1bTmLloxiNOAFUlUVEVLI6mOcogfhpwMH